随着科技的进步,机器人技术已经深入到各个领域,尤其在搬运领域,机器人已经成为了不可或缺的工具,本文将详细介绍搬运机器人的机构设计及建模,以期带给读者一定的信息增益。
机构设计

搬运机器人的机械部分主要由驱动系统、移动平台和末端执行器组成,驱动系统通常采用电机带动减速器的方式,以达到驱动机器人移动的目的,移动平台负责机器人的整体移动,一般采用轮式或履带式结构,末端执行器则相当于人的手部,负责抓取、搬运物品。
2、控制系统
控制系统是机器人运作的核心,负责接收指令、分配动作,常见的控制系统有单片机、PLC、计算机等,为了提高机器人的灵活性和适应性,我们通常会采用多关节、多自由度的设计,并通过传感器、控制器等组件实现精准控制。
建模
1、运动学建模
运动学建模是研究机器人运动规律的重要手段,通过分析机器人的关节、坐标系等基本元素,我们可以得到机器人运动的基本规律,在建模过程中,我们需要考虑机器人各个关节的运动学方程、关节角度与末端执行器姿态之间的关系等。
2、动力学建模
动力学建模是研究机器人承载重物时的工作能力,通过分析机器人的质量、摩擦系数、重心位置等因素,我们可以得到机器人在不同负载下的运动特性,在建模过程中,我们需要考虑重力、驱动力的作用,以及关节扭矩与运动速度之间的关系等。
3、控制算法建模
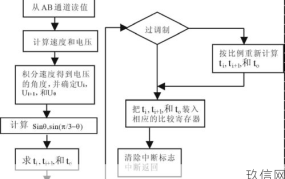
控制算法建模是实现机器人精准控制的关键,常见的控制算法有PID控制、模糊控制、神经网络控制等,通过建立合适的控制模型,我们可以实现机器人对环境的自适应、对任务的智能决策等功能,在建模过程中,我们需要考虑控制算法的稳定性、鲁棒性等因素,以确保机器人的稳定运作。
实际应用
搬运机器人广泛应用于制造业、物流业、危险环境代替人力进行搬运工作,在制造业中,搬运机器人可以自动完成工件的抓取、搬运、放置等操作,大大提高了生产效率,在物流业中,搬运机器人可以完成货物的分拣、堆叠等工作,降低了人力成本,提高了物流效率,在危险环境中,搬运机器人可以代替人力执行危险的任务,如深海探索、地震救援等,大大提高了作业的安全性。
操作指导
1、熟悉机器人的机械结构、控制系统等基本知识,以便正确安装和调试机器人。
2、根据实际需求选择合适的控制算法和参数设置,以达到最佳的运作效果。
3、定期检查机器人的运行状态,及时处理异常情况,确保机器人的安全和稳定运作。
本文从机构设计、建模、实际应用及操作指导等多个方面详细介绍了搬运机器人的设计及建模,通过本文的介绍,相信读者对搬运机器人的运作原理和操作方法有了更深入的了解,随着科技的不断进步,相信搬运机器人将在更多领域发挥重要作用,为人类的生活和工作带来更多便利。